Seniai verdam idėją, kad reikia paskristi keliese sparnas prie sparno kažkur tolėliau (arba aukščiau, virš rūko), bet tai nėra taip paprasta net su radaru - lėktuvų greičiai skiriasi, nuolat kuris nors pasimeta.
Kad supaprastint situaciją - perkam daug vienodų lėktuvų ir tada skristi kartu bus daug paprasčiau - nes charakteristikos nesiskirs.
Taigi, papuolė Eachine Airloader akcija. Yra nupirkta iš viso 7 airloaderiai (po 75€) ir 4 volanteksai (po 80€ tiems kas sąraše iš anksčiau) + 2 volanteksai (po 85€ kitam pirkimui):
- Andrius (ABLomas) - ($+, delivered)
- Laimonas - ($+ delivered)
- Giedrius pats nusipirko ($+, delivered)
- Vilkas - sakė 1.2G ($+, delivered, Volantex)
- Tadas ($+, delivered, Volantex)
- Romanas ($+, delivered)
- Vilius ($+, delivered, Volantex)
- Virgilijus (Volantex -)
- Olegas ($+, delivered)
- Laimonas (kitas Laimonas) ($+, delivered)
- Laimonas (pirmas Laimonas, ima 2!) ($+, delivered)
- Audrius ($+, delivered, Volantex -)
- Saulius (Volantex -)
Pakol yra eilučių su klaustukais - kreipkitės telegram @ABLomas ir imkit/rezervuokit saviškį.
(visi išdalinti, jei kas nespėjot ir labai dega - yra dar vienas tuščias siurblys ir vienas pilnai surinktas)
Airloaderis aka siurblys - lėktuvas tikrai ne pats gražiausias, su juo rekordų irgi nepaimsit, bet jis yra labai pigus, paprastas, surenkamas iš dėžės per 15min. ir yra lėtas (stall speed < 30km/h) - tai tiks ir naujokams, jei neperkrautas. Taip pat jį galima paleisti pačiam (pusher setup, dugnas laisvas) netgi pradedančiajam.
Toliau - info tik tiems, kas skris formation:
Kad suvienodinti skrydžio charakteristikas ir netrukdyti vieni kitiems, reiks laikytis kai kurių taisyklių:
- Naudojamas tik tas pats gamyklinis power setup’as - vienas pusher variklis. ESC, servas galima keist, jei yra poreikis. Propas gimtasis arba analogiškas.
- jei norisi išsiskirti - tai galima naudoti dažus ir izoliaciją, bet korpuso pjaustyt nereikia. Aišku išpjovimai kamerai, dugno sustiprinimai ir pan. pagal poreikius, bet tikrai nereikia keist bendros formos, nes tada vėl turėsim problemą, kad vieni skrenda greičiau, kiti lėčiau. Yra šimtai, jei ne tūkstančiai kitų modelių, kur galima customizinti iki pažaliavimo, o šitą dedikuokit formation flight tokios formos, kaip kad buvo pagamintas (bet visada galima nudažyt rožine spalva
 ).
).
- FC su vienu laisvu UART ir radaro pajungimu (žr. žemiau), GPS, INAV
- analoginis video, 1.2 arba 5.8G (arba bet kas, kas TIKRAI nei kiek netrukdo analoginiam video)
- NE 433MHz valdymas (868M, 2.4G - ką norit, bet ne 433M - dedikuota radarui)
- Bendra masė - 1350-1900g (su 4S 4000mAh liion jis sveria ~1380g, per mažas akumuliatorius - nepavyks subalansuoti CG). Įsidėkit HD kamerą, ar, galų gale, varžtų, jei per lengvas; išimkit plytas, jei per sunkus - panašaus svorio skris panašiu greičiu.
Pagal galimybes pasidalinsim PID’ais ir kt. FC nustatymais, jei reiks, nors toks buldozeris turi labai gerai skrist ir su default nustatymais.
Planuojamas masinis skrydis - 2022 pavasarį, tai dar yra laiko viską pasidaryti net ir labai neturint laiko.
Mini-FAQ:
- Ne, DJI skaitmena negali skristi kartu. Visų pirma, tai radaro kodas ten dar visiškai kreivas ir vos veikia, antra - DJI labai smarkiai trukdo analoginiam ryšiui
- Per silpnas variklis ir lėktuvas skrenda per lėtai? Taip, tas tiesa, bet reik taikytis prie kitų. Su standartiniu setupu (1.4kg, vienas pusheris, 4S 4Ah) galima nesunkiai nuskristi 20km RTT ar pusę valandos lėtai cruisinti virš rūko, to užtenka daugumai planuojamų scenarijų. O savo 12KW 16S setupą įdėkit į kitą lėktuvą

- LED galima (ir netgi rekomenduojama) susidėti, kuo daugiau, kuo galingesni - tuo geriau, skrendant krūvoje papildoma indikacija ir matomumas tikrai nepakenks
Radaro nustatymai:
Radarai atrodo štai taip:
Jam reikia paskirti vieną serial portą ant FC, su pinoutu (FC pusėje):
GND
VCC
TX
RX
Jei tokios sekos ant FC nėra - pasidarykit išvadus su “spygliukais”, kad lauke būtų galima prijungti/atjungti be didesnių problemų.
Paruoškit vietą, kur būtų galima įdėt radarą - kad OLED negautų smūgių (pvz. nusileidžiant, ar neužkristų akumuliatorius). Radaro matmenys 25x55mm. Prieiga nėra būtina, bet geriau ją turėti (pvz. ant žemės patogu pasitikrinti, ar visi node’ai matomi, spaudžiant viršutinį mygtuką, perkrauti radarą (apatinis mygtukas).
Antena pozicionuojama vertikaliai, gali būt korpuso viduje, nelabai svarbu. Geriau, kad neužstotų metaliniai/karboniniai objektai.
INAV nustatymai:
- geriausia (nebūtina, rekomenduojama) turėt atskirą layout be kitų objektų (arba tik su būtiniausiais, pvz. rodyklė namo ir voltažas), nes jei OSD yra pilnas informacijos - kitų lėktuvų rodyklės “lips ant viršaus”
- tame layout būtina įjungt centro rodyklę (crosshair). Tokiu principu galima kitam layout nerodyti radaro (išjungtas crosshair)
- set osd_hud_radar_disp = 4
(max 4 lėktuvai vienu metu, apribojimas dėl timeslotų, t.y. kuo daugiau lėktuvų, tuo lėčiau atnaujinamos koordinatės, ateityje bus “6”)
Tą patį galima padaryt ir per CMS, ne per CLI: CMS, OSD > Hud > Displayed items, pasirinkt Radar max aircraft 4
- Serial port nustatymai: 115200 baud, įjungtas MSP, nieko daugiau nereikia nurodyti
Radaras nerodys informacijos, pakol nėra krypties info (heading). Tai reiškia, kad ant žemės su statiškais lėktuvais radarai vieni kitų nerodys, kad tą apeit, reik turėt arba įjungtą kompasą (magnetometer), arba eiti su lėktuvu tam tikra kryptim (kad gautų krypties vektorių iš GPS).
Daugiau info:
Svarstytos alternatyvos:
-
Dancing wings hobby super ray 1100mm wingspan epp fpv rc airplane delta wing flying wing beginner kit/pnp Sale - Banggood.com - 40€, būtų nieko, bet čia daugiau darbo surenkant, jis greitesnis (kas formation flight atveju trūkumas), tai yra sparnas (daug kas nemoka paleist, prašo kitų, tai reik 4 rankų vienam lėktuvui) ir dar - tai yra EPP, kas reiškia kad plėvelė nelimpa, klijai irgi sunkiai, tai vienintelis pakaitaliojimas - tik dažyt
-
Esky eagles 1100mm wingspan epo trainer beginner rc airplane glider pnp Sale - Banggood.com - daug geresnė alternatyva nei kiti lėktuvai skrydžio prasme, bet ir brangesnis - perlipa 100€ ribą, kas daug ką atbaidytų
-
https://hobbyking.com/en_us/volantex-757-7-ranger-1600mm-fpv-glider-63-pnf.html - svarstom kiek bus perkančių su nuolaida.
Airloader surinkimas ir review: Arxangel's RC projects: Eachine Airloader FPV Cruiser - the ugly surprise!
Jei kam reikia apšvietimo su valdymu - galima panaudoti ESC, ką aš ir Olegas padarėm.
Kad supaprastint ir dar labiau palinksmint reikalus, aš padariau custom variantą, tinkantį BS_NFET. Jis turi 5 režimus (< 1100 visi išjungti, paskui 1100-1300 ir t.t. su 200 intervalais - skirtingi blyksėjimo variantai), bet pagrindiniai vis tiek palikti - standartinis lėktuvo strobe:
- pirmas output - strobe vienas (“lėktuvo priekinis”)
- antras (vidurinis) output - strobe du (“lėktuvo galinis” - arba sparnų galai, o pirmas output - lėktuvo galinis)
- trečias output - nav lights - t.y. žalia/raudona ant sparnų ar šonų (jos junginėjasi on/off)
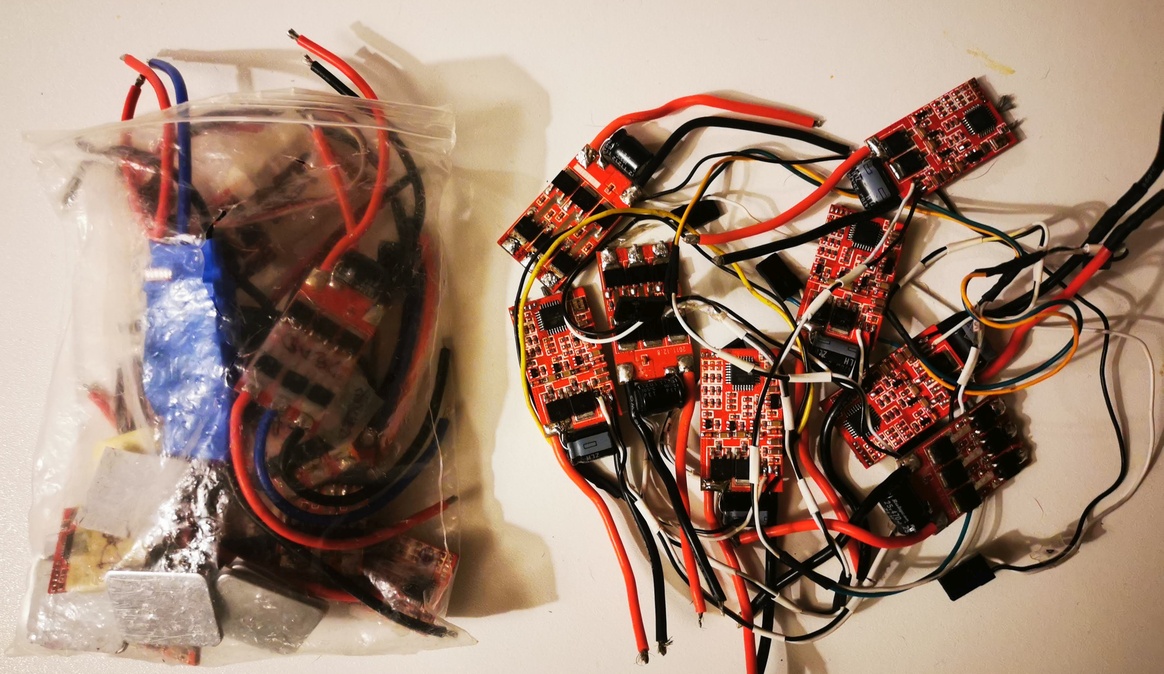
Suflashinau dar papildomai 11x F20A ESC. Ten stovi labai galingi mosfetai (bet praktikoje reiktų ribot srovę iki ~40A per kanalą, daugiau PCB neatlaikys), kiekvienas individualiai patikrintas ir viskas veikia. Kondensatoriai visiškai nebūtini, laidus kiekvienas gali prisilituot pagal save, įranga nenauja, kažkada skridusi.
Matmenys 40x24mm, svoris 9g.
Vieną kanalą galima naudoti kaip ON/OFF switch (nuo >1700us PWM) jei yra reikalas kažką kito įjungti.
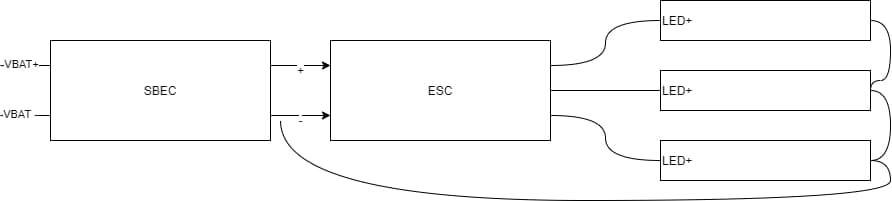
Siūloma prijungimo schema (SBEC nebūtinas, jei LED gali atlaikyti VBAT - patys ESC ramiai laiko 4S, teoriškai gal ir 6S atlaikytų (bet geriau tokių LED ant lėktuvo nedėt).
Reikia? Telegram
@ABLomas ir užsisakot savo, vnt. kaina
11€.
Norit pasidaryt savo? Pirmyn:
bs_nfet_5modes.hex (5.8 KB)
Kairėje pusėje - maišas negyvėlių, pagamintų procese (tai firmware įjungiau abi FET puses, tai gate noise, tai susilietė laidai, brokas ir t.t.) - žodžiu, ne viskas taip paprasta kaip atrodo.
Siurblio PID, ne galutiniai:
# version
# INAV/MATEKF405SE 4.0.0 Nov 12 2021 / 10:12:52 (a6c7d81c)
# GCC-10.2.1 20201103 (release)
# start the command batch
batch start
# reset configuration to default settings
defaults noreboot
# resources
# mixer
mmix reset
mmix 0 1.000 0.000 0.000 0.000
mmix 1 1.000 0.000 0.000 0.000
# servo mix
smix reset
smix 0 2 1 100 0 -1
smix 1 3 0 100 0 -1
smix 2 4 2 100 0 -1
smix 3 5 17 100 0 -1
smix 4 6 16 100 0 -1
smix 5 7 15 100 0 -1
smix 6 8 11 100 0 -1
# servo
servo 2 1000 2000 1500 -100
servo 3 1000 2000 1500 -100
servo 4 1000 2000 1500 -100
servo 6 1000 1900 1500 100
servo 7 960 1910 1500 100
# safehome
# logic
# gvar
# pid
pid 0 0 1 8 0 0 1 0 0 0
# feature
feature -SOFTSERIAL
feature MOTOR_STOP
feature GPS
feature BLACKBOX
feature PWM_OUTPUT_ENABLE
# beeper
# blackbox
blackbox -NAV_ACC
blackbox NAV_POS
blackbox NAV_PID
blackbox MAG
blackbox ACC
blackbox ATTI
blackbox RC_DATA
blackbox RC_COMMAND
blackbox MOTORS
# map
map TAER
# serial
serial 3 2 115200 115200 0 115200
serial 4 262144 115200 115200 0 115200
serial 5 2048 115200 115200 0 115200
# led
# color
# mode_color
# aux
aux 0 0 2 1300 2100
aux 1 1 0 1700 2100
aux 2 12 0 900 1300
aux 3 53 1 1300 1700
aux 4 10 1 1700 2100
aux 5 21 3 1300 1700
aux 6 37 3 1700 2100
aux 7 35 2 1700 2100
aux 8 42 7 1300 1700
aux 9 43 7 900 1300
aux 10 44 7 1700 2100
aux 11 13 0 1700 2100
# adjrange
# rxrange
# temp_sensor
# wp
#wp 0 invalid
# osd_layout
osd_layout 1 1 6 14 H
osd_layout 1 3 8 6 V
osd_layout 1 7 12 2 V
osd_layout 1 11 9 14 V
osd_layout 1 12 15 14 V
osd_layout 1 14 1 1 V
osd_layout 1 15 1 8 V
osd_layout 1 22 14 3 V
osd_layout 1 23 23 1 V
osd_layout 1 24 1 2 V
osd_layout 1 26 1 7 V
osd_layout 1 28 23 14 V
osd_layout 1 30 1 12 V
osd_layout 1 32 1 14 V
osd_layout 1 33 24 13 V
osd_layout 1 46 22 7 V
osd_layout 1 85 24 8 V
osd_layout 1 97 8 1 V
osd_layout 1 106 24 9 V
osd_layout 1 107 1 9 V
osd_layout 1 110 1 13 V
osd_layout 1 124 23 2 V
osd_layout 2 2 0 0 V
osd_layout 2 3 8 6 V
osd_layout 2 9 24 13 H
osd_layout 2 11 9 14 V
osd_layout 2 12 15 14 V
osd_layout 2 14 1 1 V
osd_layout 2 15 24 8 V
osd_layout 2 22 14 1 V
osd_layout 2 23 24 1 V
osd_layout 2 28 23 14 V
osd_layout 2 30 1 12 V
osd_layout 2 32 1 14 V
osd_layout 2 33 24 13 V
osd_layout 2 85 1 8 V
osd_layout 2 110 1 13 V
osd_layout 3 2 0 0 V
osd_layout 3 11 14 14 V
osd_layout 3 23 13 1 V
# master
set gyro_main_lpf_hz = 25
set dynamic_gyro_notch_q = 250
set dynamic_gyro_notch_min_hz = 30
set acc_hardware = MPU6000
set acczero_x = 109
set acczero_y = -28
set acczero_z = -229
set accgain_x = 4073
set accgain_y = 4073
set accgain_z = 4011
set align_mag = CW270FLIP
set mag_hardware = NONE
set baro_hardware = DPS310
set serialrx_provider = CRSF
set blackbox_rate_denom = 4
set motor_pwm_rate = 4000
set motor_pwm_protocol = DSHOT150
set failsafe_procedure = RTH
set current_meter_scale = 250
set model_preview_type = 14
set servo_pwm_rate = 60
set small_angle = 180
set imu_acc_ignore_rate = 9
set imu_acc_ignore_slope = 5
set applied_defaults = 3
set gps_sbas_mode = EGNOS
set airmode_type = STICK_CENTER_ONCE
set nav_extra_arming_safety = OFF
set nav_wp_radius = 5000
set nav_rth_allow_landing = FS_ONLY
set nav_rth_altitude = 6000
set nav_fw_pitch2thr_smoothing = 7
set nav_fw_loiter_radius = 5000
set nav_fw_control_smoothness = 4
set osd_time_alarm = 0
set osd_alt_alarm = 0
set osd_dist_alarm = 5000
set osd_neg_alt_alarm = 20
set osd_crosshairs_style = TYPE3
set osd_crsf_lq_format = TYPE2
set i2c_speed = 800KHZ
set tz_offset = 120
set tz_automatic_dst = EU
set vtx_band = 1
set vtx_power = 4
# profile
profile 1
set fw_p_pitch = 15
set fw_i_pitch = 11
set fw_d_pitch = 5
set fw_ff_pitch = 145
set fw_p_roll = 15
set fw_i_roll = 9
set fw_d_roll = 7
set fw_ff_roll = 65
set fw_p_yaw = 24
set fw_i_yaw = 0
set fw_ff_yaw = 255
set max_angle_inclination_rll = 450
set dterm_lpf_hz = 10
set fw_turn_assist_pitch_gain = 0.500
set nav_fw_pos_z_p = 15
set nav_fw_pos_z_d = 5
set nav_fw_pos_xy_p = 60
set d_boost_min = 1.000
set d_boost_max = 1.000
set rc_expo = 60
set rc_yaw_expo = 60
set roll_rate = 18
set pitch_rate = 9
set yaw_rate = 12
# profile
profile 2
# profile
profile 3
# battery_profile
battery_profile 1
set bat_cells = 4
set throttle_idle = 2.000
set nav_fw_cruise_thr = 1450
# battery_profile
battery_profile 2
# battery_profile
battery_profile 3
# restore original profile selection
profile 1
battery_profile 1
# save configuration
save
 ).
).